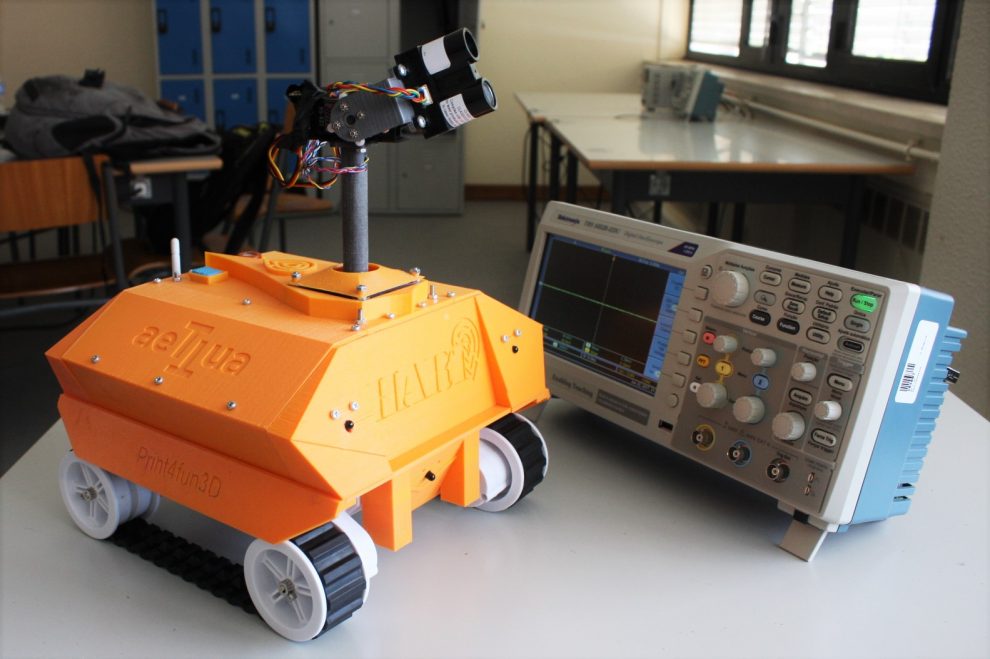
Num cenário de catástrofe porquê arriscar a vida no reconhecimento do interior de um edifício desmoronado? A solução é um robô capaz de entrar nos escombros, mapear em três dimensões o espaço, detetar focos de incêndio e medir a temperatura, humidade e monóxido de carbono e, em tempo real, enviar os dados para o exterior. Pequeno e autónomo, o robô desenvolvido por um grupo de estudantes de Engenharia Electrónica e Telecomunicações da Universidade de Aveiro (UA) quer ser uma preciosa ajuda quando todos os minutos são essenciais para salvar vidas.
Projetado por 15 estudantes do Mestrado Integrado em Engenharia Eletrónica e Telecomunicações, no âmbito da unidade curricular de Projeto em Engenharia Electrotécnica lecionada pelo docente Nuno Borges CArvalho, o robô já está em fase de protótipo e à espera de todos os apoios para, no futuro, ser fundamental no trabalho da Proteção Civil. Para tal, os estudantes têm já delineado a HART – Human Aid Robotic Technologies, uma empresa que, quando nascer, vai dar suporte ao desenvolvimento e comercialização do robô.
Projeto único num mercado onde abundam soluções voltadas essencialmente para ambientes militares e que fazem uso das câmaras apenas para recolha de imagens, o robô tem também por novidade a capacidade de dispensar um operador já que, apontam os estudantes do Departamento de Eletrónica, Telecomunicações e Informática, na fase final de desenvolvimento o robô vai ser capaz de se mover e adquirir informação de forma autónoma.
Com 1,5 quilogramas e 23 por 28 centímetros, o robô pode facilmente ser usado em todos os cenários que necessitem de medir condições ambientais e em que a obtenção de um modelo tridimensional possa ser útil. Nestes cenários os estudantes incluem incêndios, colapsos parciais, grutas, demolições e operações de reconhecimento, busca e salvamento. O robô pode ainda ser usado para ajudar na avaliação da integridade e extensão de danos num edifício afetado por um sinistro.
Do interior dos escombros o robô conseguirá informar sobre a temperatura, humidade, concentração de monóxido de carbono e presença de focos de incêndio. Será ainda possível visualizar um modelo tridimensional do espaço onde o robô se encontra.
Todos estes dados serão disponibilizados em tempo real às equipas de salvamento através de uma aplicação de computador criada para o efeito, onde a informação é apresentada de forma clara, simples e concisa, para acelerar o processo de análise e tomada de decisões.
Nesta fase de desenvolvimento, apontam os estudantes, o robô já consegue fazer a sensorização do ambiente e gerar o respetivo modelo 3D. Dentro em breve, será a vez da implementação da capacidade de adquirir e sobrepor vários modelos 3D e da instalação do movimento autónomo. Depois disso estará pronto a entrar em ação.